
|
Porquê fazer da RS a sua casa da engenharia?

Não importa o tamanho do problema que encontrar - estamos aqui para que possa enfrentar o que a vida lhe apresenta. É por isso que somos a sua casa de engenharia.
A RS é a única empresa que pode oferecer aos engenheiros um lugar onde pesquisar, projetar, prototipar, construir e manter um produto ou aplicação. Em todo o espetro do desenho, construção e manutenção, queremos que tenha esse sentimento de "boas-vindas" quando chegar à RS.
Porquê fazer da RS a sua casa?
 Sabemos o que os nossos clientes precisam e facilitamos as coisas. Oferecemos a tranquilidade de saber que, com uma ampla gama de produtos em constante crescimento, tudo o que precisa existe na RS e está disponível à distância de um clique.
Sabemos o que os nossos clientes precisam e facilitamos as coisas. Oferecemos a tranquilidade de saber que, com uma ampla gama de produtos em constante crescimento, tudo o que precisa existe na RS e está disponível à distância de um clique.
Temos uma ampla gama de produtos e serviços para todos os setores e aplicações. Especificamente, a nossa extensa gama de tecnologias, novos produtos e ferramentas DesignSpark.
Com a introdução constante de novos produtos, pode estar na vanguarda do seu setor. Oferecemos uma gama de produtos própria de alta qualidade, a nossa coleção RS Pro, que fornece componentes de alto desempenho a preços excelentes.
Mas não é só isso. Mantemos excelentes relacionamentos de fornecimento com as principais marcas da indústria, para que possa escolher os produtos certos para si e consegui-los todos num só lugar. Isso significa que pode ter a certeza de que temo preços competitivos sem ter que comparar.
Temos 500 mil produtos em stock, e podem ser entregues assim que precisar deles - no dia seguinte ou em 48 horas, através de uma rede global de centros de distribuição.
E para os momentos em que precisa de um pouco de assistência ou orientação adicional, o nosso serviço de atendimento ao cliente dedicado e equipas técnicas farão tudo o que puderem para ajudar.
A RS não é simplesmente um lugar para qualquer engenheiro, a RS é o seu lugar. Temos a solução para cada uma das suas necessidades e oferecemos um serviço personalizado para cada um dos nossos clientes.
Queremos que os engenheiros de todas as disciplinas se sintam em casa ao usar os nossos serviços e que sejamos sempre a sua primeira escolha.
O produto do seu futuro
 Mas fazemos mais do que oferecer produtos - como um negócio, sentimos que é vital apoiar a ambição e a inspiração de cada engenheiro que vem até nós.
Mas fazemos mais do que oferecer produtos - como um negócio, sentimos que é vital apoiar a ambição e a inspiração de cada engenheiro que vem até nós.
Para incentivar as futuras gerações a seguir seus sonhos, partilhamos e apoiamos histórias notáveis da vida real dos nossos clientes e fornecedores que alcançaram feitos incríveis.
Descubra os percursos extraordinários de pessoas do nosso setor e saiba mais sobre porque somos for the inspired.
Os engenheiros são pessoas com grandes ideias - e para isso, também temos o DesignSpark. Entendemos aquilo que quer saber e queremos ajudá-lo rapidamente e facilmente a obter soluções para os seus problemas.
É por isso que criamos o DesignSpark - uma comunidade on-line para engenheiros que lhe oferece ferramentas e conhecimentos adicionais para transformar essas grandes ideias em realidade.
Aquele sentimento familiar
Temos recursos para todas as áreas e aspetos da engenharia, tudo num só lugar. Se trabalha em engenheira mecânica, industrial ou de manutenção, arquitetura, design ou se é apenas um entusiasta, estamos aqui para ajudar. Temos o produto, serviço e conselhos adequados - para que possa alcançar o que pretende. Mas ainda há mais.
Descubra mais sobre mecatrónica com artigos sobre a mecatrónica em movimento e a aplicação de sensores em tecnologias mecatrónicas.

DesignSpark
![]() DesignSpark é a casa da nossa comunidade de engenharia. É uma plataforma online que permite aos engenheiros apaixonados partilhar ideias e encontrar recursos ou ferramentas para desenvolver os seus projetos.
DesignSpark é a casa da nossa comunidade de engenharia. É uma plataforma online que permite aos engenheiros apaixonados partilhar ideias e encontrar recursos ou ferramentas para desenvolver os seus projetos.
Leia alguns dos artigos fantásticos que o DesignSpark oferece, escritos por outros engenheiros!

A equipa da Fundação Raspberry Pi esteve a desenvolver a próxima geração do Módulo de Computação Raspberry Pi, conhecido como CM3.

Apresentamos a câmara Intel RealSense ZR300, com reconhecimento de pessoas e objetos e Localização e Mapeamento simultâneos 6DoF .
Descubra mais sobre o Braccio Tinkerkit, uma maneira barata e divertida de começar a sua viagem pela robótica.

Não perca este guia para o MeArm Robot Kit V1.1, que vem com todos os produtos necessários para construir um braço robótico completo.
O que está dentro de um PLC?
A Ascensão da Mecatrónica

O termo "mecatrónica" foi cunhado pela primeira vez em 1969 por Tetsuro Mori, engenheiro de robótica da Yaskawa Electric Corporation.
É a combinação entre mecânica e eletrónica.
A mecatrónica combina conceitos de informática com controlo mecânico, elétrico e de engenharia para desenhar, construir e gerir produtos. Atualmente é aplicada no dia-a-dia em soluções de transporte, telecomunicações óticas e engenharia biomédica, para citar alguns exemplos.
Para competir com sucesso num mercado global, as empresas modernas de fabricação devem ter a capacidade de integrar eletrónica, controlo, software e engenharia mecânica numa gama de produtos e sistemas inovadores.
É aqui que podemos ajudar. Somos a sua casa da engenharia, porque dispomos de todos os produtos necessários, das marcas líderes da indústria.
Mecatrónica em movimento
 Em 1768, o relojoeiro suíço Pierre Jaquet-Droz percebeu que precisava de uma maneira de aumentar as vendas. Juntamente com o seu filho e um músico, Jean-Frédéric Leschot, construiu três intrincados robôs mecânicos. O mais complexo tinha a capacidade de escrever com base nas configurações internas de uma roda.
Em 1768, o relojoeiro suíço Pierre Jaquet-Droz percebeu que precisava de uma maneira de aumentar as vendas. Juntamente com o seu filho e um músico, Jean-Frédéric Leschot, construiu três intrincados robôs mecânicos. O mais complexo tinha a capacidade de escrever com base nas configurações internas de uma roda.
Com a tecnologia do século XVIII, Jaquet-Droz e companhia tiveram que se limitar a engrenagens mecânicas, alavancas e roldanas. Mesmo assim, conseguiram criar autómatos que continuam a cativar os visitantes de um museu em Neuchâtel, onde são exibidos. Os fabricantes atuais têm mais opções ao seu dispor. Dispositivos como o motor de passo podem parecer a escolha óbvia para integrar movimento nos sistemas. Mas há casos em que faz sentido usar outra tecnologia. Mesmo os materiais gelatinosos podem ser um impulso importante no movimento programável.
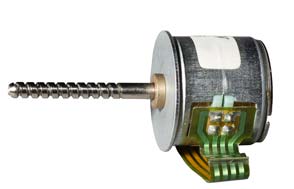 Em aplicações mecatrónicas, robóticas e similares, o motor de passo continua a ser uma escolha popular. O movimento não precisa de ser rotativo. Parafusos sem fim e componentes mecânicos similares, como os fabricados pela Igus e Thomson Linear, convertem a rotação do motor em movimento linear. Motores como o motor de passo de ímanes ou o bipolar de Faulhaber normalmente incluem parafusos sem fim integrados.
Em aplicações mecatrónicas, robóticas e similares, o motor de passo continua a ser uma escolha popular. O movimento não precisa de ser rotativo. Parafusos sem fim e componentes mecânicos similares, como os fabricados pela Igus e Thomson Linear, convertem a rotação do motor em movimento linear. Motores como o motor de passo de ímanes ou o bipolar de Faulhaber normalmente incluem parafusos sem fim integrados.
O motor de passo é baseado no motor de corrente contínua, que gira sempre que uma corrente é aplicada, mas permite que ele se mova facilmente para uma posição rotativa fixa antes de parar. Esta abordagem permite aplicações nas quais o posicionamento preciso e o controle de velocidade são necessários.
O motor de passo está desenhado em torno de um estator fixo que emprega várias bobinas independentes. Este motor controla a posição de um rotor que usa materiais magnéticos permanentes ou as suas próprias bobinas para formar um íman quando a corrente é aplicada. As bobinas fixas são usadas para gerar campos magnéticos dinamicamente em duas ou mais posições ao redor do estator.
Quando energia é aplicada ao motor, o rotor magnetizado gira para a posição mais estável que encontra, alinhando o seu próprio campo magnético da bobina ativa no estator. Quando é necessário mover-se para outra posição, a energia é removida da bobina, que é substituída por outra, o que força o rotor a mover-se novamente. Os motores de passo, como o RS Pro Hybrid, oferecem ângulos discretos de apenas 0,9°. No entanto, a precisão de posicionamento dos motores de passo não se limita a passos discretos. Os micro passos de micro processadores ou o controlo lógico permitem criar sistemas de posicionamento de alta precisão com ângulos de passo arbitrários efetivos.
Em vez de remover completamente a corrente de uma bobina enquanto fornece energia a outra, nos micro passos a corrente é reduzida numa enquanto aumenta na outra. O controlo do equilíbrio permite implementar pequenos passos virtuais entre os passos completas que são implementados fisicamente.
Embora o motor de passo permita o controlo de movimento quase contínuo através de micro passos, pode apresentar desvantagens quando é importante ter alta velocidade. Os motores são frequentemente usados em baixas velocidades para oferecer controlo e torque máximos. No entanto, alguns produtos como o motor de passo de ímanes de disco Portescap podem alcançar altas velocidades de aceleração e rotação de mais de 10.000 rpm.
Um design continuamente variável, como um motor sem escovas, pode oferecer a combinação de torque alto e posicionamento preciso. Tradicionalmente, os motores de corrente alternada eram usados devido ao seu custo relativamente baixo, nos casos em que a precisão do movimento não era uma prioridade. Problemas de torque a baixa velocidade levaram a um aumento na quantidade de capacidade de processamento dos motores de corrente alternada. Atualmente, as técnicas de controlo vetorial são amplamente utilizadas para melhorar a eficiência dos motores de corrente alternada e o seu torque a baixa velocidade, e converteram gradualmente os motores de corrente alternada sem escovas numa possível solução em situações onde é necessária uma alta potência e precisão.
No controlo vetorial, um modelo matemático dos campos magnéticos do motor é atualizado várias vezes por segundo para fornecer uma estimativa da relação entre tensão, velocidade e torque dentro do motor. Os algoritmos de controlo de laço fechado ajustam os níveis de tensão e corrente de forma dinâmica em cada uma das bobinas internas do motor, não só para maximizar o torque, mas também para mover o rotor para posições específicas. Uma vantagem dessas técnicas de controlo é que os cálculos estimados geralmente são suficientemente precisos para dispensar o uso de sensores de posição adicionais, o que ajuda a reduzir o custo total do sistema. O requisito principal é um processador de alto desempenho, como o processador integrado ADSP-BF547 Blackfin da Analog Devices, bem como controladores específicos de sistema on-chip (SoC), que simplificam a implementação do controlo vetorial para os usuários. Exemplos incluem a gama SoC TMPM370 da Toshiba, que combina um núcleo de processador ARM Cortex-M3 com um coprocessador específico de controlo vetorial e interfaces de controlador do motor.
Para situações em que é necessária menos força, mas a alta precisão é essencial, em ambas as direções, o atuador da bobina de voz é uma boa escolha. O atuador da bobina de voz é uma implementação do princípio da força de Lorentz. Este determina que a força de um condutor que transmite a corrente num campo magnético é proporcional à força do campo e da corrente.
Este tipo de motor tornou-se a escolha preferida para pequenos sistemas de mecatrónica, como os mecanismos de focagem de lente das câmaras do smartphone. Isto ocorre porque mudar a direção da corrente inverte a direção da força. Como resultado, o atuador da bobina de voz converte-se num atuador bidirecional de alta precisão que é capaz de suportar o processo iterativo de procura binária que permite que uma lente da câmara se foque automaticamente. Além do design rotativo encontrado nas lentes, existem também versões lineares.
Em termos elétricos, os atuadores da bobina de voz são motores monofásicos e, portanto, podem ser controlados da mesma forma que os motores de corrente contínua simples. Estes tendem a oferecer um bom desempenho em termos de ruído audível, além de apresentarem uma baixa histerese, daí o seu uso em dispositivos móveis.
 Uma abordagem diferente para o controlo de movimento é usar gás ou fluido pressurizado para empurrar os pistões. Como são menos propensos a fugas de líquido, os sistemas pneumáticos geralmente são mais usados em sistemas mais pequenos de mecatrónica. Embora geralmente esteja associado a grandes controladores industriais, o controlo de movimento pneumático permite a criação de robôs que se movem de forma semelhante aos humanos e aos animais.
Uma abordagem diferente para o controlo de movimento é usar gás ou fluido pressurizado para empurrar os pistões. Como são menos propensos a fugas de líquido, os sistemas pneumáticos geralmente são mais usados em sistemas mais pequenos de mecatrónica. Embora geralmente esteja associado a grandes controladores industriais, o controlo de movimento pneumático permite a criação de robôs que se movem de forma semelhante aos humanos e aos animais.
Os pistões podem ser implementados ao longo de membros articulados para atuar como músculos artificiais. Foram usados, por exemplo, em robótica para reabilitação, para ajudar pessoas a recuperar de lesões graves, a levantar-se e a mover-se, servindo também para oferecer resistência nos exercícios de fisioterapia.
Em muitas situações, o controlo contínuo de movimento não é necessário. O movimento pode consistir simplesmente em abrir ou fechar uma válvula, uma ação que pode ser parte de um sistema hidráulico ou pneumático. Neste caso, a solução é um solenoide, que consiste numa bobina condutora enrolada em torno de uma estrutura metálica móvel. O solenoide usa a Lei de indicação de Faraday: a estrutura move-se numa direção que aumenta a indutância da bobina.
Geralmente, a aplicação de uma força ao solenoide força a estrutura a mover-se para uma nova posição. Uma configuração típica é um solenoide normalmente desconectado numa válvula: a estrutura bloqueia o fluxo quando não é aplicada corrente. Quando a corrente é aplicada, a estrutura move-se para uma posição que permite o fluxo de fluido ou gás. Um exemplo deste tipo de solenoide desenhado para controlo pneumático é o Parker Viking Extreme G.
 Ainda que muitos solenoides tenham sido desenhados para estados simples de ativação / desativação, solenoides proporcionais também são usados em alguns projetos para fornecer controlo variável. O solenoide proporcional equilibra a força máxima que pode ser aplicada por uma corrente contra uma mola. Partindo dos níveis mais baixos, à medida que a corrente aumenta gradualmente, o solenoide move-se até ao seu alcance máximo. Um problema do solenoide proporcional é a histerese: ao manter a corrente num certo nível, a estrutura não restaura necessariamente a sua posição após a subida da corrente para esse nível. Quando é necessária uma baixa histerese, um atuador de bobina de voz linear pode ser a melhor escolha.
Ainda que muitos solenoides tenham sido desenhados para estados simples de ativação / desativação, solenoides proporcionais também são usados em alguns projetos para fornecer controlo variável. O solenoide proporcional equilibra a força máxima que pode ser aplicada por uma corrente contra uma mola. Partindo dos níveis mais baixos, à medida que a corrente aumenta gradualmente, o solenoide move-se até ao seu alcance máximo. Um problema do solenoide proporcional é a histerese: ao manter a corrente num certo nível, a estrutura não restaura necessariamente a sua posição após a subida da corrente para esse nível. Quando é necessária uma baixa histerese, um atuador de bobina de voz linear pode ser a melhor escolha.
Olhando para o futuro, materiais inovadores, como os hidrogéis, oferecerão outras formas de controlo de movimentos. Alguns hidrogéis baseados em polímeros podem comportar grandes mudanças de volume quando um campo elétrico é aplicado. Isso torna-os úteis em situações em que um músculo artificial é necessário ou quando o amortecimento ativo junto com o movimento é uma vantagem. No entanto, esses materiais ainda estão a dar os seus primeiros passos e os sistemas eletromecânicos descritos acima continuarão a ser as principais opções para designers de mecatrónica no futuro próximo. No entanto, parece claro que existem muitas opções disponíveis graças à combinação de eletrónica e mecânica, e cada uma tem as suas próprias vantagens para cada caso específico.
Sensores em movimento
 A Internet das Coisas (IoT – Internet of Things) atual é apenas o começo de uma revolução na criação de um ambiente mais inteligente. Baseado em sensores que enviam dados a um software inteligente, executado em servidores, tem as características de um sistema principalmente passivo. A IoT funciona como suporte para as decisões, não as implementa. A mecatrónica é o que fecha o círculo, facilitando uma interação ativa que visa oferecer uma maior comodidade e eficiência, tanto a nível industrial como em casa e nos sistemas de transporte.
A Internet das Coisas (IoT – Internet of Things) atual é apenas o começo de uma revolução na criação de um ambiente mais inteligente. Baseado em sensores que enviam dados a um software inteligente, executado em servidores, tem as características de um sistema principalmente passivo. A IoT funciona como suporte para as decisões, não as implementa. A mecatrónica é o que fecha o círculo, facilitando uma interação ativa que visa oferecer uma maior comodidade e eficiência, tanto a nível industrial como em casa e nos sistemas de transporte.
Os robôs vão ajudar-nos a realizar as tarefas diárias rotineiras, bem como ajudar na fabricação e na prestação de serviços. Algumas das suas funções já estão a ser usadas em veículos autónomos que nos transportam de um lugar para outro. Para fazê-lo de forma segura e eficiente, esses robôs devem saber onde estão. As gerações anteriores de robôs para automação de fábricas e máquinas de produção não podiam fazê-lo porque trabalhavam em gaiolas de segurança e seguiam trajetórias previsíveis, programadas antecipadamente. Para proporcionar maior flexibilidade e fiabilidade, a próxima geração de equipamentos de produção deve ser capaz de monitorizar o seu próprio movimento e o dos outros no local de trabalho.
Para esse fim, existem dois elementos problemáticos de deteção na mecatrónica. Um deles é garantir que a posição de cada parte móvel seja consistente com o modelo interno do algoritmo de controlo de movimento. Há pouco mais de uma década, os sensores necessários para esse tipo de análise de um sistema baseado em mecatrónica teriam sido tecnicamente impossíveis. Mesmo os mais simples e mais básicos teriam sido caros de produzir. Mas o lançamento da Nintendo Wii mudou a forma como os designers começaram a pensar em incorporar a deteção de movimento nos sistemas. Os comandos da Wii incluíram acelerómetros para detetar a forma como um jogador se movia. O iPhone da Apple levou a deteção de movimento para o próximo nível. Mas este produto e os inúmeros smartphones que inspirou não incorporavam apenas acelerómetros.
Os dispositivos móveis atuais contêm acelerómetros, giroscópios e sensores de pressão, bem como recetores para detetar os sinais do sistema global de navegação por satélite (GNSS). O resultado é uma combinação de inputs em tempo real que permite detetar com precisão a localização do dispositivo praticamente em qualquer lugar do mundo.
Existe uma razão pela qual os dispositivos móveis, como os smartphones, incorporam diferentes sensores para detetar o movimento. Embora não tenha sido desenhado especificamente para esta tarefa, um grupo de acelerómetros distribuídos ortogonalmente ao longo dos eixos "x", "y" e "z" permite a deteção de rotação, além de movimento ao longo de um caminho linear. Mas os acelerómetros apresentam imprecisões que podem gerar erros de posicionamento. Além disso, os acelerómetros podem encontrar dificuldades para detetar se o sistema está realmente em movimento. Uma fonte contínua de erros é a aceleração causada pela gravidade. Pode ser difícil para um acelerómetro distinguir dois componentes de aceleração.
Um filtro passa-alto oferece um mecanismo para filtrar a componente gravitacional da aceleração, mantendo o input das componentes de aceleração que se espera que mudem mais rapidamente por causa do movimento físico. Muitas vezes, um filtro passa-alto deve ser combinado com um filtro passa-baixo para eliminar fontes de nível baixo, ruído de alta frequência e vibração. Mesmo assim, o acelerómetro pode acumular erros devido às numerosas fontes de ruído a que está sujeito.
O giroscópio foi desenhado para detetar o movimento rotativo, mas também oferece sinais complementares aos do acelerómetro. Esses inputs eliminam as fontes problemáticas de ruído que ocorrem após o processamento digital.
 O giroscópio é afetado por um conjunto diferente de fontes de ruído. A deriva é a fonte mais comum de erros e acumula-se ao longo do tempo. As medidas de calibração dos próprios sensores giroscópicos ajudam a reduzir os erros causados pela deriva e oferecem um valor de compensação que pode ser incorporado no ciclo de integração. Mas em sistemas que oferecem mais de um tipo de sensor de movimento, existe outra opção: a fusão de sensores.
O giroscópio é afetado por um conjunto diferente de fontes de ruído. A deriva é a fonte mais comum de erros e acumula-se ao longo do tempo. As medidas de calibração dos próprios sensores giroscópicos ajudam a reduzir os erros causados pela deriva e oferecem um valor de compensação que pode ser incorporado no ciclo de integração. Mas em sistemas que oferecem mais de um tipo de sensor de movimento, existe outra opção: a fusão de sensores.
A fusão dos sensores, como o nome indica, abrange um grupo de algoritmos que combinam os inputs de diferentes tipos de sensores e usam-nos para criar um sensor virtual mais preciso e confiável do que qualquer um dos elementos independentes.
Atualmente, existem diferentes técnicas para realizar a fusão de sensores que funcionam satisfatoriamente para monitorizar o movimento. Um exemplo de uso comum atual é o filtro Kalman. Essencialmente, o filtro Kalman fornece uma média ponderada das leituras dos sensores. Não é uma média simples, porque considera também a incerteza. As atualizações no algoritmo que são consideradas mais propensas a ser mais precisas recebem um peso maior do que aquelas que terão provavelmente uma maior incerteza. O modelo interno do filtro oferece a capacidade de se adaptar às mudanças no desempenho de sensores que se desviam do padrão, o que oferece respostas mais robustas e ajuda a melhorar a fiabilidade global.
No mercado, foram introduzidos CIs de hub de sensores que simplificam a integração de dados de vários tipos de sensores e apoiam os algoritmos de fusão de sensores. Graças ao uso de filtros baseados em hardware, eliminam uma grande parte da carga de trabalho do microcontrolador host. Isto permite reduzir o custo do sistema e o consumo de energia em comparação com os algoritmos baseados exclusivamente no software. A maior integração gerou dispositivos que combinam funções de hub com os próprios sensores e o processamento necessário para implementar as tecnologias de fusão como o filtro Kalman. Um exemplo é o Bosch Sensortec BNO055, no qual o software FusionLib da empresa é usado.
Devido à combinação de acelerómetro, giroscópio e sensor geomagnético, o BNO055 permite detetar o movimento em nove eixos, enquanto o software FusionLib combina as medidas para formar um todo coerente. O dispositivo integrado liberta os clientes da necessidade de desenvolver os seus próprios controladores e algoritmos de fusão.
Os detetores de movimento fornecem a um robô uma imagem coerente dos seus próprios movimentos. Mas para que se mova com segurança, a máquina deve ser capaz de detetar movimentos ao seu redor. É neste ponto que a segunda classe geral de sensores necessários para um movimento mecatrónico seguro e eficiente ganha importância. Esta classe garante que todo o sistema de movimento não colide acidentalmente com outros objetos e que o sistema sabe onde está. Nesta área, estão incluídas inúmeras tecnologias de sensores.
Os mais simples são os sensores desenhados para encontrar obstruções. Existem diferentes tecnologias que suportam esta aplicação. Hoje em dia, alguns robôs usam sensores de pressão na sua superfície para parar quando entram em contacto com uma obstrução ou um objeto que devem manipular. Normalmente, esta abordagem funciona com membros e motores que se movem devagar, e em que o robô exerce uma força relativamente baixa. As cortinas de luz, além dos sensores de proximidade por infravermelhos, são meios para detetar obstruções sem entrar em contacto com o objeto. Em ambos os casos, o reflexo das ondas que saltam da lente é usado para determinar a distância relativa à obstrução.
As câmaras permitem um controlo mais sofisticado dos sistemas mecatrónicos. Não só as câmaras convencionais estão incluídas, mas também as câmaras time-of-flight, como o sensor REAL3 da Infineon Technologies, que permite que os espaços 3D complexos sejam traçados no campo de visão. A proliferação de tecnologias de realidade virtual ajudará a reduzir o custo desses dispositivos, de modo que eles estejam disponíveis para muitos sistemas autónomos de mecatrónica, da mesma forma que o mercado de ADAS tem ajudado a desenvolver sensores de radar e LIDAR por menor custo. Um exemplo de tecnologia de radar que está a ser incorporado no ambiente industrial é a gama BGT24M / L de IC de onda milimétrica da Infineon.
A chave para usar sensores mais avançados, como radar e 2D, e câmaras de propagação, reside em algoritmos avançados baseados em tecnologias de inteligência artificial, como a aprendizagem profunda. Um problema chave com a mecatrónica móvel é o consumo de energia. Originalmente, a aprendizagem profunda foi implementada em microprocessadores e unidades de processamento gráfico (GPUs) de gama alta, com enormes gastos de energia. Atualmente, os fabricantes de máquinas possuem dispositivos especializados, como o SoC Movidius Myriad-2. O Myriad-2, que já é usado em sistemas de assistência ao condutor, é um processador de visão otimizado para aprendizagem profunda e inferência em tempo real. Com a ajuda de frameworks de software disponíveis gratuitamente, como o Caffe e o Tensorflow, os integradores de mecatrónica podem explorar facilmente as suas capacidades graças ao uso da unidade de computação de rede neural, que se conecta a uma porta USB.
Através de hubs de sensores avançados e ferramentas focadas no desenvolvimento, como a unidade de computação de rede neural, está a tornar-se mais fácil para os developers trabalharem em sistemas de mecatrónica e de robótica para atualizar a funcionalidade dos seus projetos e ajudar a que sejam mais móveis. Com o crescimento do mercado, os custos serão ainda mais reduzidos e soluções adicionais estarão disponíveis, de modo que o movimento inteligente se tornará uma parte essencial da crescente IoT.
Fabricantes Destacados












Junte-se à conversa #RSHome
|
|
|||||